



2月5日
楚才系列10款人形机器人
在武汉洪山礼堂南广场惊艳登场
带来一场酷炫的科技秀
标志着湖北人形机器人整机
实现从0到1、从无到有

楚才们是如何诞生的?
科研攻关背后有哪些故事?
未来的它们将在哪些领域大显身手?
点击视频,为你揭秘 ↓↓↓
从无到有,第一步如何迈出?

2024年4月
湖北正式启动
人形机器人整机和零部件突破工程
确定丁汉、陈学东、刘胜三位院士领衔
科研人员+工程师大团队攻关
工程化推进的研发模式
武汉光谷华汇黄强教授团队倾力加入
4个攻坚团队立即行动
确立人形机器人研发方向

“荆楚”团队:
研发电驱动通用人形机器人
实现长续航、稳定行走和多模态融合感知

“劳动者”团队:
面向的是电网巡检、运维作业
具有较强的负载能力和地形适应能力

“天问”团队:
打造一双类人灵巧手
拥有人的灵巧操作能力
也拥有人的高灵敏度的触觉传感能力
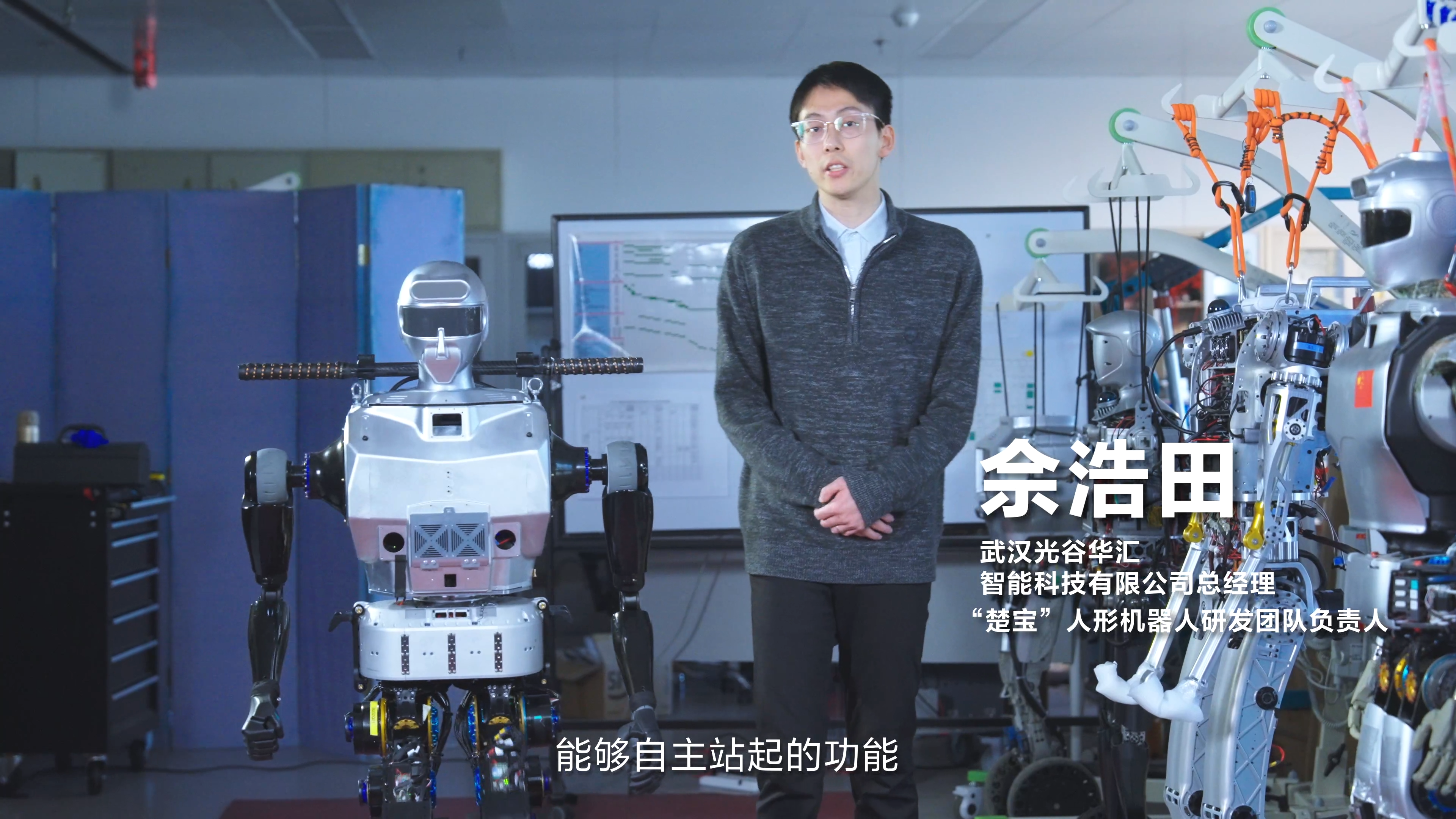
“楚宝”团队:
面向特种行业
机器人具备摔倒后
能够自主站起的功能

从0到1,科研难题如何突破?
然而,研发之路并非一帆风顺
自研电机无法量产
外购关节性能不佳
上肢操作灵活性不达预期
零部件损坏率过高
……
数百次爬起
上千次滑落
上万次重来
4个团队不断攻坚克难
终于迎来曙光
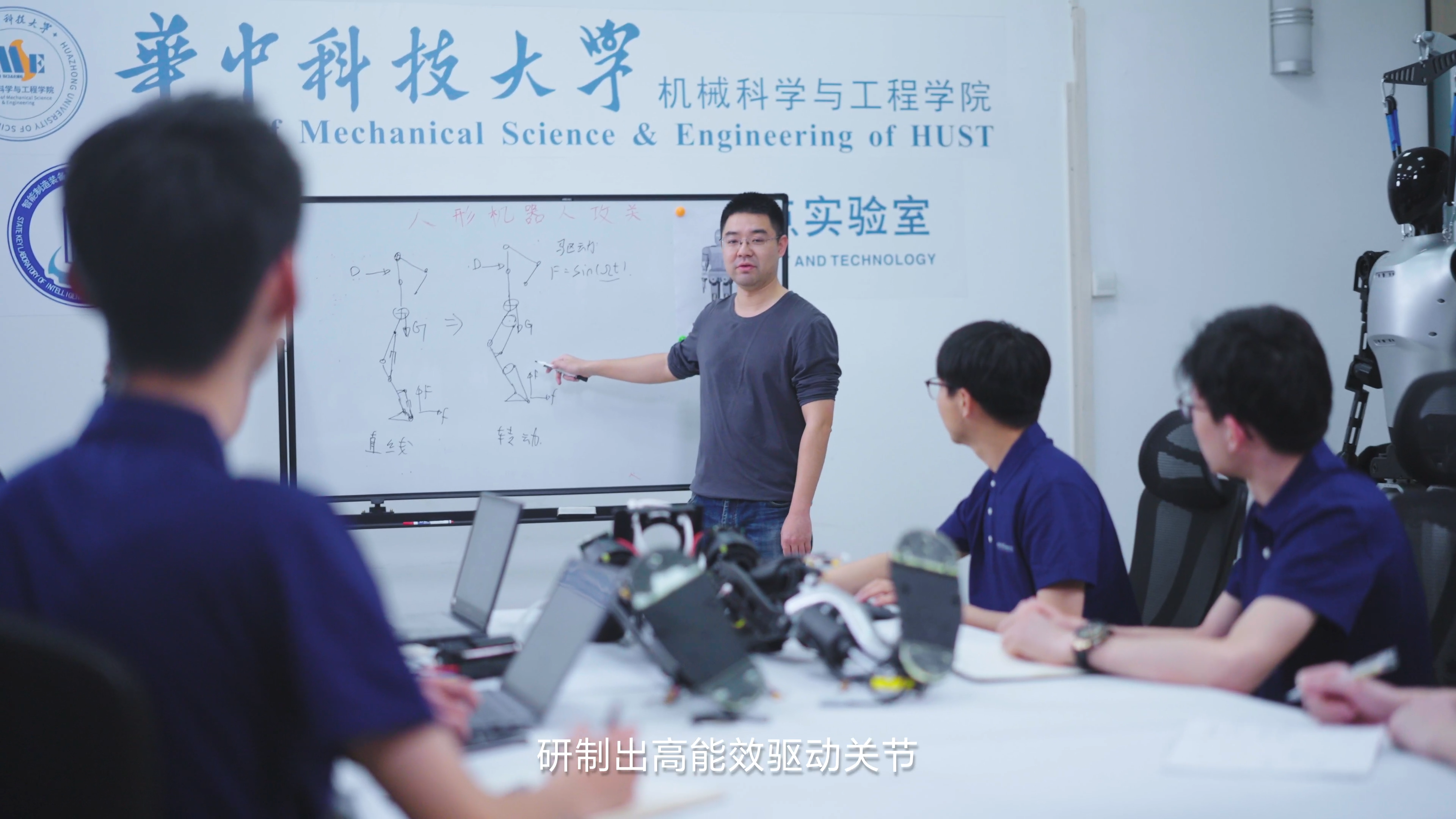
“荆楚”团队:
联合省内机器人核心部件供应商
通过产学研协同攻关
研制出高能效驱动关节和多模态感知模组

“劳动者”团队:
采用自研驱动取代原厂驱动
并推动自研关节研发

“天问”团队:
收集分析人手的各项数据
反向得出人手最优的结构参数
制定最适合的控制策略

“楚宝”团队:
借鉴航天货包运输的先进经验
对机器人核心部件进行加固设计
并采用了新的缓冲材料

“荆楚”通过了行走测试
“劳动者”负载能力提升显著
“天问”成功通过抓取测试
“楚宝”具备摔倒爬起功能
7个月里
4个团队迈出坚实一步奠定未来
智启新篇,楚才将如何大显身手?
未来
楚才人形机器人将从实验室走向产业化
满足湖北相关产业的多场景需求
“荆楚”由华中科技大学丁汉院士团队研发
其下肢采用行星滚柱丝杠驱动
具有低能耗长续航优势
搭载仿生类人头部和高灵敏度电子皮肤,
能够实现视、听、触等多模态融合感知和表情交互
将服务于智慧医疗、装配制造等场景
“劳动者”由华中科技大学陈学东院士团队与武汉格蓝若公司联合设计开发
拥有国际领先的负重能力和动态控制能力
还配备了智慧大脑,能够与人进行互动
其直膝行走技术的实现
在国内外相同自重的机器人中处于领先水平
未来有望在电网巡检、工业制造等行业发挥重要作用
“天问”由武汉大学刘胜院士团队研发
其“灵巧手”能如人手般单手抓握一只苹果
是国际上目前最低成本、高可靠性的刚柔耦合灵巧手
“天问”的核心零部件80%实现了湖北自研自产
将主要应用到商业零售、智慧康养等场景中
“楚宝”由武汉光谷华汇黄强教授团队研发
具备走、跑、跳、摔、滚、爬等多种运动模式
摔倒后能自主站起
其高动态运动控制算法技术在国内处于领先水平
将主要面向公共安全、特种作业
完成一些高风险、高难度任务

从1到100,未完待续
仅用7个月
湖北实现人形机器人从0到1的突破
树立了国内快速研发的新标杆
湖北将依托强大的科研力量和产业基础
以“用”为导向,全力拓展应用场景
打造人形机器人产业创新发展高地
从0到1,已实现
从1到100,未完待续
楚才们的成长还在继续,邀您与长江云共同关注~
(来源:长江云新闻)